- 博客访问: 1125481
- 博文数量: 146
- 博客积分: 190
- 博客等级: 入伍新兵
- 技术积分: 5225
- 用 户 组: 普通用户
- 注册时间: 2012-06-06 08:24
慢行者
- ·
- ·
- ·
- ·
- ·
- ·
- ·
- ·
- ·
- ·
分类: linux
2013-04-28 17:08:36
作者:曹老师,讲师。
前面我们说了如何i2c用户模式驱动,这种驱动基于i2c子系统,但是他对于应用程序开发人员的要求较高,需要应用程序开发人员了解硬件的一些东西,比如时序,地址等等,而多数时候应用程序开发人员是按照操作文件的方法操作设备,所以我们更希望用一些更简单的接口去访问。也就是我们今天的内容——基于i2c子系统的字符驱动。
i2c子系统的代码分为三部分如图:
![]()
host:主机控制器驱动
device:设备驱动代码
core: 核心代码,提供设备与控制器的接口
一、主机控制器驱动
linux下主机控制器驱动,大多数是bsp提供的,这里不多说,简单说下它主要干的活。i2c主机控制器在内核里又叫适配器,用结构i2c_adapter描述。
struct i2c_adapter {
struct module *owner;
unsigned int class; /* classes to allow probing for */
const struct i2c_algorithm *algo; /* the algorithm to access the bus */
……
};
struct i2c_algorithm 提供设备访问控制器的接口,定义如下:
struct i2c_algorithm {
int (*master_xfer)(struct i2c_adapter *adap, struct i2c_msg *msgs,int num);
int (*smbus_xfer) (struct i2c_adapter *adap, u16 addr,unsigned short flags, char read_write,u8 command, int size, union i2c_smbus_data *data);
u32 (*functionality) (struct i2c_adapter *);
};
其中master_xfer就是我们给设备端提供的接口,这部分内容按照芯片手册中寄存器的操作实现数据的收发。
最终我们将i2c_adapter注册到系统中,使用如下函数:
int i2c_add_numbered_adapter(struct i2c_adapter *);
二、核心代码
这部分就不说了,刚才我们介绍的函数全部是核心代码提供,它主要是提供标准的统一的接口。
三、设备代码
基于i2c的字符驱动的编写首先我们需要了解几个特定的结构。
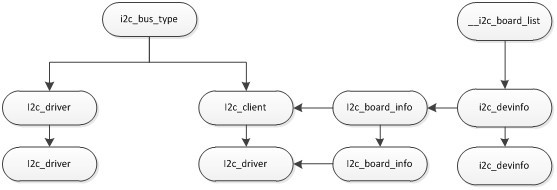
1、i2c_bus_type
i2c总线结构定义了一些总线相关的方法,这里我们关系的是i2c_driver和i2c_client的配备规则,为什么匹配呢,i2c_client携带硬件信息,而i2c_driver只负责操作设备而不管操作的是那个设备它需要的硬件信息有i2c_client提供,所以需要i2c_client和i2c_driver协同操作,而一个系统中i2c_driver和i2c_client都可能有多个,如何得到自己的另一半就是我所说的匹配规则,i2c_bus_type的匹配规则定义如下:
struct bus_type i2c_bus_type = {
.name = "i2c",
.match = i2c_device_match,
.probe = i2c_device_probe,
.remove = i2c_device_remove,
.shutdown = i2c_device_shutdown,
.pm = &i2c_device_pm_ops,
};
static int i2c_device_match(struct device *dev, struct device_driver *drv)
{
struct i2c_client *client = i2c_verify_client(dev);
struct i2c_driver *driver;
if (!client)
return 0;
/* attempt an of style match */
if (of_driver_match_device(dev, drv))
return 1;
driver = to_i2c_driver(drv);
/* match on an id table if there is one */
if (driver->id_table)
return i2c_match_id(driver->id_table, client) != null;
return 0;
}
我们发现i2c总线的匹配规则是id或name两种,id优先级高。
2、板级结构:
struct i2c_board_info {
char type[i2c_name_size]; //芯片类型,其实也就是名字,用来匹配
unsigned short flags; //标志位,一些特定的标志
unsigned short addr; //地址,从设备地址,不包括读写位
void *platform_data; //用来传递一些私有数据
struct dev_archdata *archdata; //同上
struct device_node *of_node;
int irq;
};
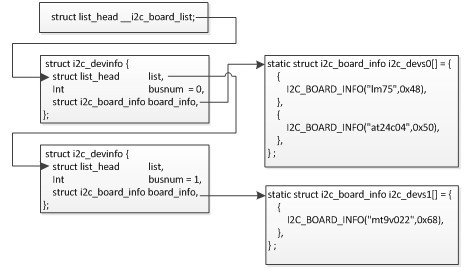
板子上没有一个i2c的设备,我们就要注册一个这样的结构体,到内核里边,这部分代码一般添加在平台代码里边,注册函数如下:
i2c_register_board_info(int busnum, struct i2c_board_info const *info,unsigned n);
busnum 现在很多cpu有多条i2c总线,这个参数表示第几条总线
info 是一个结构体数据,表示我们要注册的i2c设备
n 表示我们注册了几个i2c设备
通过上面函数就能把设备注册到系统中。结构如图:
3、i2c_client
这个结构我们不需要操作,是操作系统即核心代码自动完成,这个过程其实是在注册i2c_adapter的时候完成的。即在函数i2c_add_numbered_adapter中完成,最终i2c_client携带者i2c_board_info和i2c_adapter的信息。
4、i2c_driver
这部分代码主要负责注册i2c_driver和匹配相应的i2c_client。i2c_driver定义如下:
struct i2c_driver {
int (*probe)(struct i2c_client *, const struct i2c_device_id *);
int (*remove)(struct i2c_client *);
struct device_driver driver;
const struct i2c_device_id *id_table;
……
};
注册函数如下:
int i2c_add_driver(struct i2c_driver *driver);
这个函数负责注册i2c_driver并匹配i2c_client,当匹配到了对于的i2c_client,probe函数被执行,并且i2c_client被以参数的形式传递过来。我们可以通过i2c_client提供的硬件信息和操作接口操作我们想要的设备。
5、数据传输
数据传输结构:
struct i2c_msg {
__u16 addr; /* slave address */
__u16 flags;
#define i2c_m_ten 0x0010 /* this is a ten bit chip address */
#define i2c_m_rd 0x0001 /* read data, from slave to master */
#define i2c_m_nostart 0x4000 /* if i2c_func_protocol_mangling */
#define i2c_m_rev_dir_addr 0x2000 /* if i2c_func_protocol_mangling */
#define i2c_m_ignore_nak 0x1000 /* if i2c_func_protocol_mangling */
#define i2c_m_no_rd_ack 0x0800 /* if i2c_func_protocol_mangling */
#define i2c_m_recv_len 0x0400 /* length will be first received byte */
__u16 len; /* msg length */
__u8 *buf; /* pointer to msg data */
};
消息的封装与上节用户模式驱动相似,封装好消息使用如下函数提交给核心代码,最终通过控制器驱动发送给具体的设备。
int i2c_transfer(struct i2c_adapter *adap, struct i2c_msg *msgs, int num);
adap 适配器,由client->adapter获得。
msgs 消息
num 消息个数
通过上面内容我们就可以构建我们的基于linux下i2c子系统的设备驱动了,例程如下:
平台代码添加:
static struct i2c_board_info i2c_devs0[] __initdata = {
{i2c_board_info("lm75", 0x48),},
};
i2c_register_board_info(0, i2c_devs0, array_size(i2c_devs0));
驱动代码:
#include < linux/module.h>
#include < linux/kernel.h>
#include < linux/init.h>
#include < linux/fs.h>
#include < linux/cdev.h>
#include < linux/i2c.h>
#include < linux/slab.h>
#include < asm/uaccess.h>
module_license ("gpl");
#define lm75_reg_conf 0x01
static const u8 lm75_reg_temp[3] = {
0x00, /* input */
0x03, /* max */
0x02, /* hyst */
};
struct lm75_data
{
u16 temp[3]; /* register values,
0 = input
1 = max
2 = hyst */
};
static int lm75_major = 250;
static int lm75_minor = 0;
static int number_of_devices = 1;
static dev_t devno = 0;
static struct cdev cdev;
static struct i2c_client *new_client;
struct lm75_data *data;
static int lm75_read_value(struct i2c_client *client)
{
struct i2c_msg msgs[2];
int status;
char buf1[2];
char buf2[2];
msgs[0].len = 1;
msgs[0].addr = client->addr; // lm75 设备地址
msgs[0].flags = 0;//write
msgs[0].buf = buf1;
msgs[0].buf[0] = lm75_reg_temp[0];
msgs[1].len = 2;//读出的数据
msgs[1].addr = client->addr;// lm75 设备地址
msgs[1].flags = i2c_m_rd;//read
msgs[1].buf = buf2;//存放返回值的地址。
status = i2c_transfer(client->adapter, msgs, 2);
if(status < 0)
return status;
printk("1 = %2x %2x\n", buf2[0], buf2[1]);
return (buf2[0] << 8) | buf2[1];
}
static ssize_t lm75_read(struct file *file, char __user *buff, size_t count, loff_t *offset)
{
int status;
status = lm75_read_value(new_client);
if(status < 0)
{
return status;
}
printk("status = %x\n", status);
if(copy_to_user(buff, (char *)&status, sizeof(status)))
return -efault;
return 0;
}
static int lm75_open(struct inode *inode, struct file *file)
{
return 0;
}
static int lm75_release(struct inode *inode, struct file *file)
{
return 0;
}
static struct file_operations lm75_fops = {
.owner = this_module,
.read = lm75_read,
.open = lm75_open,
.release = lm75_release,
};
static int lm75_probe(struct i2c_client *client, const struct i2c_device_id *id)
{
int ret = 0;
new_client = client;
devno = mkdev(lm75_major, lm75_minor);
ret = register_chrdev_region(devno, number_of_devices, "lm75");
if(ret)
{
printk("failed to register device number\n");
goto err_register_chrdev_region;
}
cdev_init(&cdev, &lm75_fops);
cdev.owner = this_module;
ret = cdev_add(&cdev, devno, number_of_devices);
if(ret)
{
printk("failed to add device\n");
goto err_cdev_add;
}
return 0;
err_cdev_add:
unregister_chrdev_region(devno, number_of_devices);
err_register_chrdev_region:
kfree(data);
return ret;
}
static int lm75_remove(struct i2c_client *client)
{
cdev_del(&cdev);
unregister_chrdev_region(devno, number_of_devices);
return 0;
}
enum lm75_type { /* keep sorted in alphabetical order */
lm75,
lm75a,
};
static const struct i2c_device_id lm75_ids[] = {
{ "lm75", lm75, },
{ "lm75a", lm75a, },
{ /* list end */ }
};
static struct i2c_driver lm75_driver = {
.driver = {
.name = "lm75",
},
.probe = lm75_probe,
.remove = lm75_remove,
.id_table = lm75_ids,
};
static int __init s5pc100_lm75_init(void)
{
return i2c_add_driver(&lm75_driver);
}
static void __exit s5pc100_lm75_exit(void)
{
i2c_del_driver(&lm75_driver);
}
module_init(s5pc100_lm75_init);
module_exit(s5pc100_lm75_exit);